Yumuşak yol verici, yumuşak başlatma, yumuşak durdurma, hafif yükte enerji tasarrufu ve çoklu koruma fonksiyonlarını birleştiren bir motor kontrol cihazıdır. Esas olarak, güç kaynağı ile kontrol edilen motor ve elektronik kontrol devresi arasında seri olarak bağlanan üç fazlı anti paralel tristörlerden oluşur. Üç fazlı anti paralel tristörlerin iletim açısını kontrol etmek için farklı yöntemler kullanılır, böylece kontrol edilen motorun giriş voltajı farklı gereksinimlere göre değişir.
1. Mikroişlemci dijital otomatik kontrolünü benimser, mükemmel elektromanyetik performansa sahiptir. Yumuşak başlatma, yumuşak durdurma veya serbest durdurma.
2.Başlangıç voltajı, akımı, yumuşak başlatma ve yumuşak durdurma süresi, başlangıç akımının şokunu azaltmak için farklı yüklere göre uyarlanabilir. Kararlı performans, kolay kullanım, doğrudan ekran, küçük hacim, dijital ayar, tele-kontrol ve harici kontrol fonksiyonlarına sahiptir.
3.Faz kaybına, aşırı gerilime, aşırı yüke, aşırı akıma, aşırı ısınmaya karşı korumalı olmalıdır.
4. Giriş voltajı görüntüleme, çalışma akımı görüntüleme, arıza kendi kendine inceleme, arıza hafızası fonksiyonlarına sahiptir. 0-20mA simülasyon değeri çıkışı vardır, motor akımı izlemeyi gerçekleştirebilir.
AC endüksiyon motorunun düşük maliyeti, yüksek güvenilirliği ve seyrek bakım gerektirmesi gibi avantajları vardır.
Dezavantajları:
1. Başlangıç akımı, anma akımından 5-7 kat daha yüksektir. Ve bu, güç kaynağının büyük bir marja sahip olmasını gerektirir ve ayrıca elektrik kontrol cihazının çalışma ömrünü azaltarak bakım maliyetini iyileştirir.
2. Başlangıç torku, normal başlangıç torkunun iki katıdır ve yük şokuna ve tahrik bileşenlerinin hasar görmesine neden olur. RDJR6 yumuşak yol verici, motor voltajını düzenli olarak iyileştirmek için kontrol edilebilir thystör modülü ve faz kaydırma teknolojisini kullanır. Ayrıca, kontrol parametresiyle motor torku, akım ve yük gereksinimlerini karşılayabilir. RDJR6 serisi yumuşak yol verici, AC asenkron motorun yumuşak başlatma ve yumuşak durdurma işlevlerini kontrol etmek ve gerçekleştirmek için mikroişlemci kullanır, eksiksiz koruma işlevine sahiptir ve metalurji, petrol, maden ve kimya endüstrilerindeki motor tahrik ekipmanlarında yaygın olarak kullanılır.
Üretim spesifikasyonu
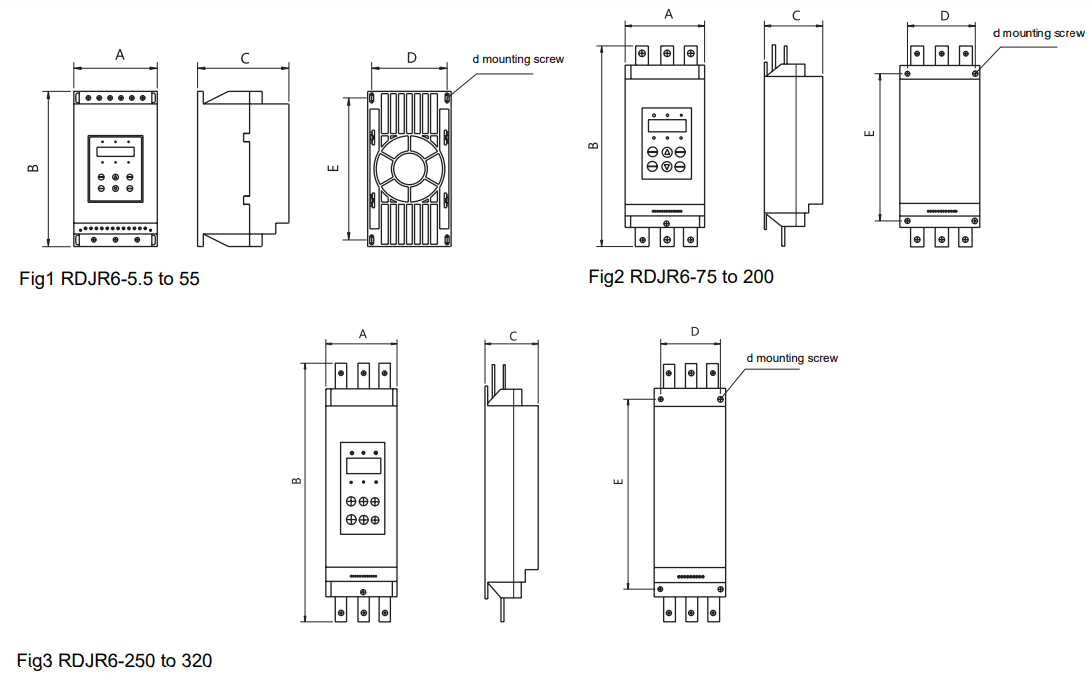
| Model No. | Anma gücü (kW) | Anma akımı (A) | Uygulanabilir motor gücü (kW) | Şekil boyutu (mm) | Ağırlık (kg) | Not | |||||
| A | B | C | D | E | d | ||||||
| RDJR6-5.5 | 5.5 | 11 | 5.5 | 145 | 278 | 165 | 132 | 250 | M6 | 3.7 | Şekil 2.1 |
| RDJR6-7.5 | 7.5 | 15 | 7.5 | ||||||||
| RDJR6-11 | 11 | 22 | 11 | ||||||||
| RDJR6-15 | 15 | 30 | 15 | ||||||||
| RDJR6-18.5 | 18.5 | 37 | 18.5 | ||||||||
| RDJR6-22 | 22 | 44 | 22 | ||||||||
| RDJR6-30 | 30 | 60 | 30 | ||||||||
| RDJR6-37 | 37 | 74 | 37 | ||||||||
| RDJR6-45 | 45 | 90 | 45 | ||||||||
| RDJR6-55 | 55 | 110 | 55 | ||||||||
| RDJR6-75 | 75 | 150 | 75 | 260 | 530 | 205 | 196 | 380 | M8 | 18 | Şekil 2.2 |
| RDJR6-90 | 90 | 180 | 90 | ||||||||
| RDJR6-115 | 115 | 230 | 115 | ||||||||
| RDJR6-132 | 132 | 264 | 132 | ||||||||
| RDJR6-160 | 160 | 320 | 160 | ||||||||
| RDJR6-185 | 185 | 370 | 185 | ||||||||
| RDJR6-200 | 200 | 400 | 200 | ||||||||
| RDJR6-250 | 250 | 500 | 250 | 290 | 570 | 260 | 260 | 470 | M8 | 25 | Şekil 2.3 |
| RDJR6-280 | 280 | 560 | 280 | ||||||||
| RDJR6-320 | 320 | 640 | 320 | ||||||||
Diyagram
İşlevsel parametre
| Kod | Fonksiyon adı | Ayar aralığı | Varsayılan | Talimat | |||||||
| P0 | başlangıç voltajı | (30-70) | 30 | PB1=1, Gerilim eğimi modeli etkilidir; PB ayarı akım modunda olduğunda, başlangıç gerilimi varsayılan değeri %40'tır. | |||||||
| P1 | yumuşak başlatma süresi | (2-60) saniye | 16'lar | PB1=1, Gerilim eğimi modeli etkilidir | |||||||
| P2 | yumuşak durma süresi | (0-60)s | 0s | Ayar=0, serbest durma için. | |||||||
| P3 | program zamanı | (0-999)s | 0s | Komutları aldıktan sonra, P3 ayar değerinden sonra başlangıcı geciktirmek için geri sayım tipini kullanın. | |||||||
| P4 | başlatma gecikmesi | (0-999)s | 0s | Programlanabilir röle eylem gecikmesi | |||||||
| P5 | program gecikmesi | (0-999)s | 0s | Aşırı ısınma giderildikten ve P5 gecikme ayarı yapıldıktan sonra hazır duruma geldi | |||||||
| P6 | aralık gecikmesi | (50-500)% | %400 | PB ayarı ile ilgilidir, PB ayarı 0 olduğunda varsayılan değer %280'dir ve değişiklik geçerlidir. PB ayarı 1 olduğunda sınır değeri %400'dür. | |||||||
| P7 | sınırlı başlangıç akımı | (50-200)% | %100 | Motor aşırı yük koruma değerini ayarlamak için kullanılır, P6, P7 giriş tipi P8'e bağlıdır. | |||||||
| P8 | Maksimum çalışma akımı | 0-3 | 1 | Geçerli değeri veya yüzdeleri ayarlamak için kullanılır | |||||||
| P9 | geçerli görüntüleme modu | (40-90)% | %80 | Ayarlanan değerden düşük olduğunda arıza göstergesi “Err09″ olur. | |||||||
| PA | düşük gerilim koruması | (100-140)% | %120 | Ayarlanan değerden yüksek olduğunda arıza göstergesi “Err10″ olur. | |||||||
| PB | başlangıç yöntemi | 0-5 | 1 | 0 akım sınırlı, 1 voltaj, 2 tekme+akım sınırlı, 3 tekme+akım sınırlı, 4 akım eğimli, 5 çift döngü tipi | |||||||
| PC | çıkış korumasına izin ver | 0-4 | 4 | 0 birincil, 1 min yük, 2 standart, 3 ağır yük, 4 kıdemli | |||||||
| PD | operasyonel kontrol modu | 0-7 | 1 | Panel, harici kontrol terminali ayarlarını seçmek için kullanılır. 0, yalnızca panel çalışması için, 1 ise hem panel hem de harici kontrol terminali çalışması için. | |||||||
| PE | otomatik yeniden başlatma seçeneği | 0-13 | 0 | 0: yasak, 1-9 otomatik sıfırlama süreleri için | |||||||
| PF | parametre değişikliğine izin ver | 0-2 | 1 | 0: yasaklı, 1 izin verilen kısmi düzeltilmiş veriler için, 2 izin verilen tüm düzeltilmiş veriler için | |||||||
| PH | iletişim adresi | 0-63 | 0 | Çoklu yumuşak başlatıcı ve üst cihazın iletişimini kullanmak için | |||||||
| PJ | program çıktısı | 0-19 | 7 | Programlanabilir röle çıkışı (3-4) ayarını kullanın. | |||||||
| PL | yumuşak durdurma akımı sınırlı | (20-100)% | %80 | P2 yumuşak durdurma akımı sınırlı ayarını kullanın | |||||||
| PP | motor anma akımı | (11-1200)A | anma değeri | Motor nominal anma akımını girmek için kullanılır | |||||||
| PU | motor düşük voltaj koruması | (10-90)% | yasaklamak | Motor düşük gerilim koruma fonksiyonlarını ayarlamak için kullanılır. | |||||||
Arıza talimatı
| Kod | Talimat | Sorun ve çözüm | |||||||||
| Hata00 | başarısızlık yok | Düşük gerilim, aşırı gerilim, aşırı ısınma veya geçici durdurma terminali açık hatası düzeltildi. Panel göstergesi yanıyorsa, sıfırlamak için "durdur" düğmesine basın ve ardından motoru çalıştırın. | |||||||||
| Hata01 | harici geçici durdurma terminali açık | Harici geçici terminal 7 ve ortak terminal 10'un kısa devre olup olmadığını veya diğer koruma cihazlarının NC kontağının normal olup olmadığını kontrol edin. | |||||||||
| Hata02 | yumuşak marş aşırı ısınması | Radyatör sıcaklığı 85C'yi aştığında, aşırı ısınma koruması, yumuşak yol verici motoru çok sık çalıştırıyor veya motor gücü yumuşak yol vericiye uygulanamıyor. | |||||||||
| Hata03 | uzatmaya başlama | Başlangıç ayar verileri uygulanabilir değil veya yük çok ağır, güç kapasitesi çok küçük | |||||||||
| Hata04 | giriş faz kaybı | Giriş veya ana döngüde arıza olup olmadığını, bypass kontaktörünün kırılıp devreyi normal şekilde çalıştırıp çalıştıramayacağını veya silikon kontrolünün açık olup olmadığını kontrol edin. | |||||||||
| Hata05 | çıkış faz kaybı | Giriş veya büyük devrede arıza olup olmadığını, bypass kontaktörünün kırılıp devreyi normal hale getirip getiremediğini, silikon kontrolünün açık olup olmadığını veya motor bağlantısında arıza olup olmadığını kontrol edin. | |||||||||
| Hata06 | dengesiz üç fazlı | Giriş 3-fazlı güç ve motorda hata olup olmadığını veya akım trafosunun çıkış sinyali verip vermediğini kontrol edin. | |||||||||
| Hata07 | başlangıç aşırı akımı | Yük çok ağır ise veya motor gücü yumuşak yol verici ile uygulanabilir ise veya ayar değeri PC (çıkış korumasına izin verilir) ayarı hatalı ise. | |||||||||
| Hata08 | operasyonel aşırı yük koruması | Yük çok ağırsa veya P7, PP ayarı hatalı. | |||||||||
| Hata09 | düşük voltaj | P9'un giriş güç voltajının veya ayar tarihinin hatalı olup olmadığını kontrol edin | |||||||||
| Hata10 | aşırı gerilim | Giriş güç voltajının veya PA ayar tarihinin hatalı olup olmadığını kontrol edin | |||||||||
| Hata11 | ayar verisi hatası | Ayarları değiştirin veya sıfırlamaya başlamak için "enter" düğmesine basın | |||||||||
| Hata12 | yükleme kısa devresi | Silikonda kısa devre olup olmadığını, yükün çok fazla olup olmadığını veya motor bobininde kısa devre olup olmadığını kontrol edin. | |||||||||
| Hata13 | yeniden başlatma bağlantı hatası | Harici başlatma terminali 9 ve durdurma terminali 8'in iki hatlı tipe göre bağlandığını kontrol edin. | |||||||||
| Hata14 | harici durdurma terminali bağlantı hatası | PD ayarı 1, 2, 3, 4 (harici kontrole izin ver) olduğunda, harici durdurma terminali 8 ve ortak terminal 10 kısa devre olmaz. Sadece kısa devre olmuşsa, motor çalıştırılabilir. | |||||||||
| Hata15 | motor düşük yükü | Motor ve yük hatasını kontrol edin. | |||||||||
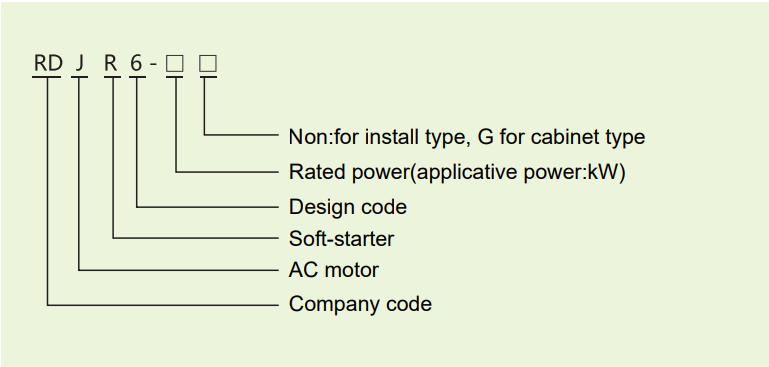
Model No.
Harici kontrol terminali

Harici kontrol terminali tanımı
| Anahtar değeri | Terminal kodu | Terminal fonksiyonu | Talimat | |||||||
| Röle çıkışı | 1 | Baypas çıkışı | Kontrol bypass kontaktörü, yumuşak başlatıcı başarıyla başladığında, güç kaynağı olmadan NO teması olur, kapasite: AC250V/5A | |||||||
| 2 | ||||||||||
| 3 | Programlanabilir röle çıkışı | Çıkış tipi ve fonksiyonları P4 ve PJ tarafından ayarlanır, güç kaynağı olmadan NO kontağıdır, kapasite: AC250V/5A | ||||||||
| 4 | ||||||||||
| 5 | Arıza rölesi çıkışı | Yumuşak başlatıcı arızalandığında, bu röle kapanır, güç kaynağı olmadan NO kontağıdır, kapasite: AC250V/5A | ||||||||
| 6 | ||||||||||
| Giriş | 7 | Geçici durdurma | Yumuşak yol vericinin normal şekilde çalışması için bu terminalin terminal10 ile kısaltılması gerekir. | |||||||
| 8 | Durdur/sıfırla | 2 hatlı, 3 hatlı terminalleri kontrol etmek için 10 numaralı terminale bağlanır, Bağlantı yöntemine göre. | ||||||||
| 9 | Başlangıç | |||||||||
| 10 | Ortak terminal | |||||||||
| Analog çıkış | 11 | simülasyon ortak noktası (-) | Çıkış akımı nominal akımın 4 katı 20mA'dir, ayrıca harici DC metre ile tespit edilebilir, çıkış yük direnci Maksimum 300'dür. | |||||||
| 12 | simülasyon akım çıkışı (+) | |||||||||
Ekran paneli

| Gösterge | Talimat | ||||||||
| HAZIR | Güç açık ve hazır durumdayken, bu gösterge yanar | ||||||||
| GEÇMEK | baypas çalışırken bu gösterge yanar | ||||||||
| HATA | arıza meydana geldiğinde bu gösterge yanar | ||||||||
| A | ayar verileri geçerli değerdir, bu gösterge yanıyor | ||||||||
| % | ayar verileri güncel yüzdedir, bu gösterge açıktır | ||||||||
| s | ayar verileri zaman, bu gösterge ışıktır | ||||||||
durum göstergesi talimatı
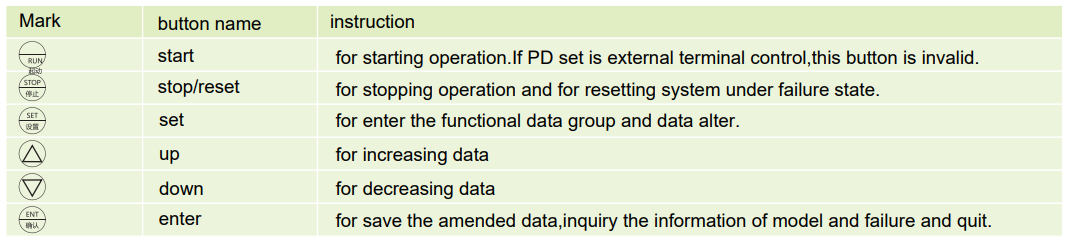
Düğme talimat talimatı
RDJR6 serisi yumuşak marş motorunun 5 çeşit çalışma durumu vardır: hazır, çalışıyor, arıza, başlat ve durdur, hazır, çalışıyor, arıza
bağıl gösterge sinyali vardır. Talimatlar için yukarıdaki Tabloya bakınız.
Yumuşak başlatma ve yumuşak durdurma işlemlerinde, yalnızca başka bir durumdaysa veri ayarlanamaz.
Ayar durumunda, ayar durumu 2 dakika sonra herhangi bir işlem yapmadan ayar durumundan çıkacaktır.
Önce "enter" tuşuna basın, ardından marş motoru şarj olur ve çalışmaya başlar. Uyarı sesini duyduktan sonra, marş motoru sıfırlanabilir.
veri fabrika değerine geri döndü.
Görünüm ve montaj boyutu
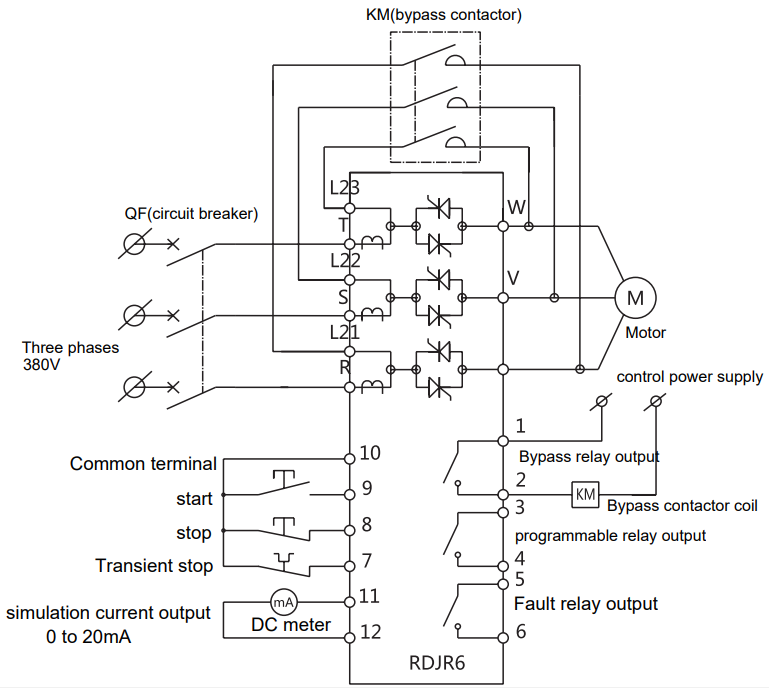
Uygulama diyagramı
Normal kontrol diyagramı
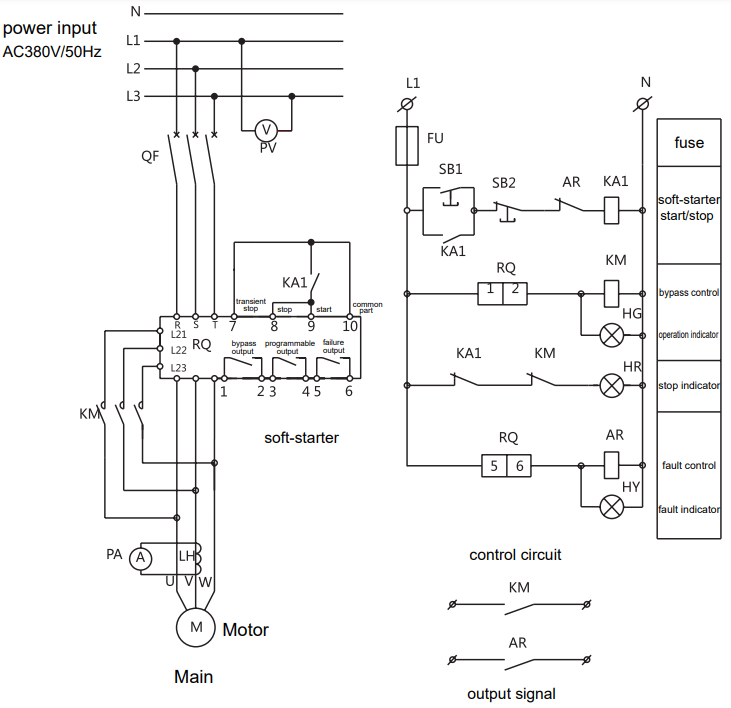
Talimat:
1.Harici terminal iki hatlı tkontrol tipini benimser. KA1 başlatma için kapatıldığında, durdurma için açılır.
2. 75 kW'ın üzerindeki yumuşak yol vericilerde, yumuşak yol vericinin iç röle kontağının sınırlı tahrik kapasitesi nedeniyle, orta röle tarafından bypass kontaktör bobininin kontrol edilmesi gerekir.
12.2 Bir ortak ve bir yedek kontrol diyagramı
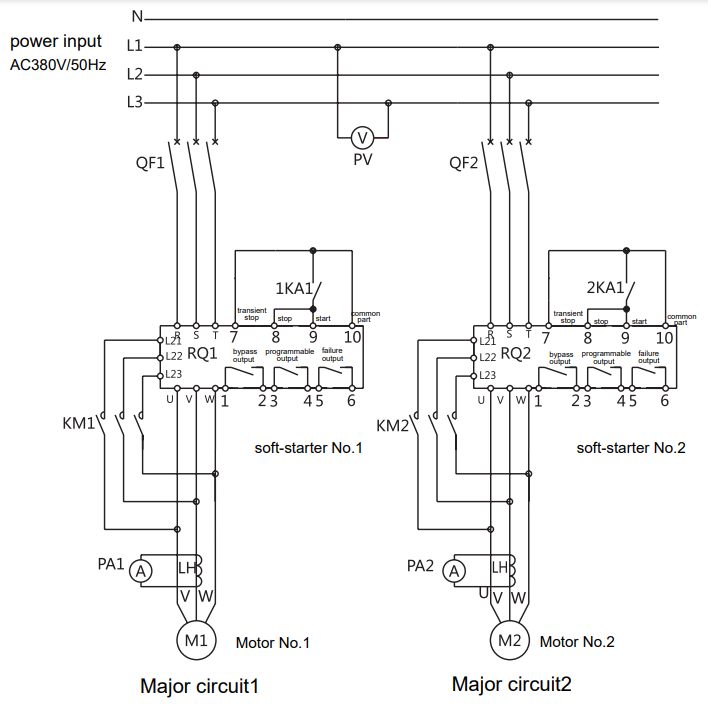
12.3 Bir ortak ve bir yedek kontrol diyagramı
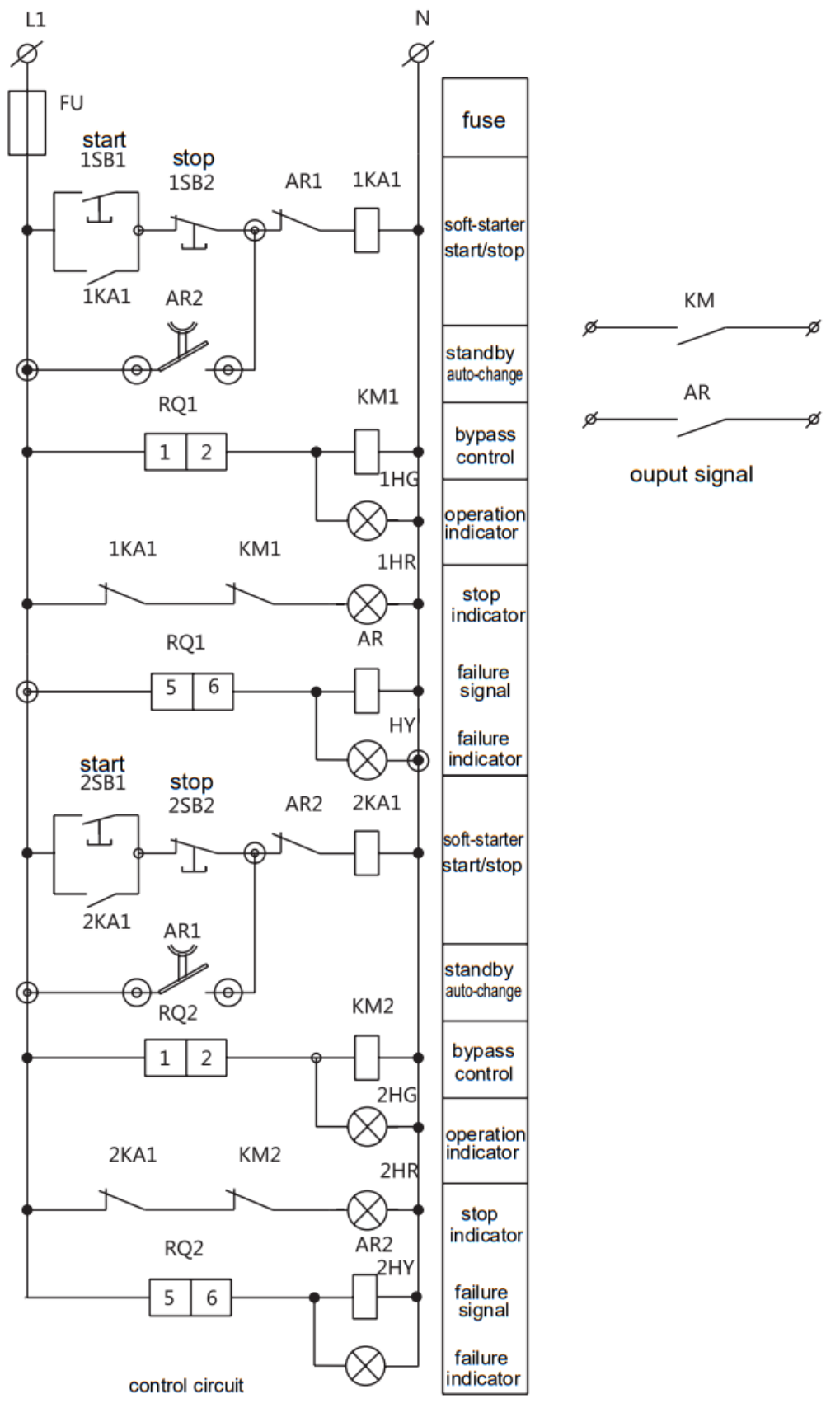
Talimat:
1. Diyagramda, harici terminal iki hatlı tiptedir
(1KA1 veya 2KA1 kapandığında çalışır, kırıldığında durur.)
2. 75 kW'ın üzerindeki yumuşak yol vericilerde, yumuşak yol vericinin iç orta röle kontağının sınırlı tahrik kapasitesi nedeniyle bypass kontaktör bobininin orta röle ile kontrol edilmesi gerekir.
AC endüksiyon motorunun düşük maliyeti, yüksek güvenilirliği ve seyrek bakım gerektirmesi gibi avantajları vardır.
Dezavantajları:
1. Başlangıç akımı, anma akımından 5-7 kat daha yüksektir. Ve bu, güç kaynağının büyük bir marja sahip olmasını gerektirir ve ayrıca elektrik kontrol cihazının çalışma ömrünü azaltarak bakım maliyetini iyileştirir.
2. Başlangıç torku, normal başlangıç torkunun iki katıdır ve yük şokuna ve tahrik bileşenlerinin hasar görmesine neden olur. RDJR6 yumuşak yol verici, motor voltajını düzenli olarak iyileştirmek için kontrol edilebilir thystör modülü ve faz kaydırma teknolojisini kullanır. Ayrıca, kontrol parametresiyle motor torku, akım ve yük gereksinimlerini karşılayabilir. RDJR6 serisi yumuşak yol verici, AC asenkron motorun yumuşak başlatma ve yumuşak durdurma işlevlerini kontrol etmek ve gerçekleştirmek için mikroişlemci kullanır, eksiksiz koruma işlevine sahiptir ve metalurji, petrol, maden ve kimya endüstrilerindeki motor tahrik ekipmanlarında yaygın olarak kullanılır.
Üretim spesifikasyonu
| Model No. | Anma gücü (kW) | Anma akımı (A) | Uygulanabilir motor gücü (kW) | Şekil boyutu (mm) | Ağırlık (kg) | Not | |||||
| A | B | C | D | E | d | ||||||
| RDJR6-5.5 | 5.5 | 11 | 5.5 | 145 | 278 | 165 | 132 | 250 | M6 | 3.7 | Şekil 2.1 |
| RDJR6-7.5 | 7.5 | 15 | 7.5 | ||||||||
| RDJR6-11 | 11 | 22 | 11 | ||||||||
| RDJR6-15 | 15 | 30 | 15 | ||||||||
| RDJR6-18.5 | 18.5 | 37 | 18.5 | ||||||||
| RDJR6-22 | 22 | 44 | 22 | ||||||||
| RDJR6-30 | 30 | 60 | 30 | ||||||||
| RDJR6-37 | 37 | 74 | 37 | ||||||||
| RDJR6-45 | 45 | 90 | 45 | ||||||||
| RDJR6-55 | 55 | 110 | 55 | ||||||||
| RDJR6-75 | 75 | 150 | 75 | 260 | 530 | 205 | 196 | 380 | M8 | 18 | Şekil 2.2 |
| RDJR6-90 | 90 | 180 | 90 | ||||||||
| RDJR6-115 | 115 | 230 | 115 | ||||||||
| RDJR6-132 | 132 | 264 | 132 | ||||||||
| RDJR6-160 | 160 | 320 | 160 | ||||||||
| RDJR6-185 | 185 | 370 | 185 | ||||||||
| RDJR6-200 | 200 | 400 | 200 | ||||||||
| RDJR6-250 | 250 | 500 | 250 | 290 | 570 | 260 | 260 | 470 | M8 | 25 | Şekil 2.3 |
| RDJR6-280 | 280 | 560 | 280 | ||||||||
| RDJR6-320 | 320 | 640 | 320 | ||||||||
Diyagram
İşlevsel parametre
| Kod | Fonksiyon adı | Ayar aralığı | Varsayılan | Talimat | |||||||
| P0 | başlangıç voltajı | (30-70) | 30 | PB1=1, Gerilim eğimi modeli etkilidir; PB ayarı akım modunda olduğunda, başlangıç gerilimi varsayılan değeri %40'tır. | |||||||
| P1 | yumuşak başlatma süresi | (2-60) saniye | 16'lar | PB1=1, Gerilim eğimi modeli etkilidir | |||||||
| P2 | yumuşak durma süresi | (0-60)s | 0s | Ayar=0, serbest durma için. | |||||||
| P3 | program zamanı | (0-999)s | 0s | Komutları aldıktan sonra, P3 ayar değerinden sonra başlangıcı geciktirmek için geri sayım tipini kullanın. | |||||||
| P4 | başlatma gecikmesi | (0-999)s | 0s | Programlanabilir röle eylem gecikmesi | |||||||
| P5 | program gecikmesi | (0-999)s | 0s | Aşırı ısınma giderildikten ve P5 gecikme ayarı yapıldıktan sonra hazır duruma geldi | |||||||
| P6 | aralık gecikmesi | (50-500)% | %400 | PB ayarı ile ilgilidir, PB ayarı 0 olduğunda varsayılan değer %280'dir ve değişiklik geçerlidir. PB ayarı 1 olduğunda sınır değeri %400'dür. | |||||||
| P7 | sınırlı başlangıç akımı | (50-200)% | %100 | Motor aşırı yük koruma değerini ayarlamak için kullanılır, P6, P7 giriş tipi P8'e bağlıdır. | |||||||
| P8 | Maksimum çalışma akımı | 0-3 | 1 | Geçerli değeri veya yüzdeleri ayarlamak için kullanılır | |||||||
| P9 | geçerli görüntüleme modu | (40-90)% | %80 | Ayarlanan değerden düşük olduğunda arıza göstergesi “Err09″ olur. | |||||||
| PA | düşük gerilim koruması | (100-140)% | %120 | Ayarlanan değerden yüksek olduğunda arıza göstergesi “Err10″ olur. | |||||||
| PB | başlangıç yöntemi | 0-5 | 1 | 0 akım sınırlı, 1 voltaj, 2 tekme+akım sınırlı, 3 tekme+akım sınırlı, 4 akım eğimli, 5 çift döngü tipi | |||||||
| PC | çıkış korumasına izin ver | 0-4 | 4 | 0 birincil, 1 min yük, 2 standart, 3 ağır yük, 4 kıdemli | |||||||
| PD | operasyonel kontrol modu | 0-7 | 1 | Panel, harici kontrol terminali ayarlarını seçmek için kullanılır. 0, yalnızca panel çalışması için, 1 ise hem panel hem de harici kontrol terminali çalışması için. | |||||||
| PE | otomatik yeniden başlatma seçeneği | 0-13 | 0 | 0: yasak, 1-9 otomatik sıfırlama süreleri için | |||||||
| PF | parametre değişikliğine izin ver | 0-2 | 1 | 0: yasaklı, 1 izin verilen kısmi düzeltilmiş veriler için, 2 izin verilen tüm düzeltilmiş veriler için | |||||||
| PH | iletişim adresi | 0-63 | 0 | Çoklu yumuşak başlatıcı ve üst cihazın iletişimini kullanmak için | |||||||
| PJ | program çıktısı | 0-19 | 7 | Programlanabilir röle çıkışı (3-4) ayarını kullanın. | |||||||
| PL | yumuşak durdurma akımı sınırlı | (20-100)% | %80 | P2 yumuşak durdurma akımı sınırlı ayarını kullanın | |||||||
| PP | motor anma akımı | (11-1200)A | anma değeri | Motor nominal anma akımını girmek için kullanılır | |||||||
| PU | motor düşük voltaj koruması | (10-90)% | yasaklamak | Motor düşük gerilim koruma fonksiyonlarını ayarlamak için kullanılır. | |||||||
Arıza talimatı
| Kod | Talimat | Sorun ve çözüm | |||||||||
| Hata00 | başarısızlık yok | Düşük gerilim, aşırı gerilim, aşırı ısınma veya geçici durdurma terminali açık hatası düzeltildi. Panel göstergesi yanıyorsa, sıfırlamak için "durdur" düğmesine basın ve ardından motoru çalıştırın. | |||||||||
| Hata01 | harici geçici durdurma terminali açık | Harici geçici terminal 7 ve ortak terminal 10'un kısa devre olup olmadığını veya diğer koruma cihazlarının NC kontağının normal olup olmadığını kontrol edin. | |||||||||
| Hata02 | yumuşak marş aşırı ısınması | Radyatör sıcaklığı 85C'yi aştığında, aşırı ısınma koruması, yumuşak yol verici motoru çok sık çalıştırıyor veya motor gücü yumuşak yol vericiye uygulanamıyor. | |||||||||
| Hata03 | uzatmaya başlama | Başlangıç ayar verileri uygulanabilir değil veya yük çok ağır, güç kapasitesi çok küçük | |||||||||
| Hata04 | giriş faz kaybı | Giriş veya ana döngüde arıza olup olmadığını, bypass kontaktörünün kırılıp devreyi normal şekilde çalıştırıp çalıştıramayacağını veya silikon kontrolünün açık olup olmadığını kontrol edin. | |||||||||
| Hata05 | çıkış faz kaybı | Giriş veya büyük devrede arıza olup olmadığını, bypass kontaktörünün kırılıp devreyi normal hale getirip getiremediğini, silikon kontrolünün açık olup olmadığını veya motor bağlantısında arıza olup olmadığını kontrol edin. | |||||||||
| Hata06 | dengesiz üç fazlı | Giriş 3-fazlı güç ve motorda hata olup olmadığını veya akım trafosunun çıkış sinyali verip vermediğini kontrol edin. | |||||||||
| Hata07 | başlangıç aşırı akımı | Yük çok ağır ise veya motor gücü yumuşak yol verici ile uygulanabilir ise veya ayar değeri PC (çıkış korumasına izin verilir) ayarı hatalı ise. | |||||||||
| Hata08 | operasyonel aşırı yük koruması | Yük çok ağırsa veya P7, PP ayarı hatalı. | |||||||||
| Hata09 | düşük voltaj | P9'un giriş güç voltajının veya ayar tarihinin hatalı olup olmadığını kontrol edin | |||||||||
| Hata10 | aşırı gerilim | Giriş güç voltajının veya PA ayar tarihinin hatalı olup olmadığını kontrol edin | |||||||||
| Hata11 | ayar verisi hatası | Ayarları değiştirin veya sıfırlamaya başlamak için "enter" düğmesine basın | |||||||||
| Hata12 | yükleme kısa devresi | Silikonda kısa devre olup olmadığını, yükün çok fazla olup olmadığını veya motor bobininde kısa devre olup olmadığını kontrol edin. | |||||||||
| Hata13 | yeniden başlatma bağlantı hatası | Harici başlatma terminali 9 ve durdurma terminali 8'in iki hatlı tipe göre bağlandığını kontrol edin. | |||||||||
| Hata14 | harici durdurma terminali bağlantı hatası | PD ayarı 1, 2, 3, 4 (harici kontrole izin ver) olduğunda, harici durdurma terminali 8 ve ortak terminal 10 kısa devre olmaz. Sadece kısa devre olmuşsa, motor çalıştırılabilir. | |||||||||
| Hata15 | motor düşük yükü | Motor ve yük hatasını kontrol edin. | |||||||||
Model No.
Harici kontrol terminali
Harici kontrol terminali tanımı
| Anahtar değeri | Terminal kodu | Terminal fonksiyonu | Talimat | |||||||
| Röle çıkışı | 1 | Baypas çıkışı | Kontrol bypass kontaktörü, yumuşak başlatıcı başarıyla başladığında, güç kaynağı olmadan NO teması olur, kapasite: AC250V/5A | |||||||
| 2 | ||||||||||
| 3 | Programlanabilir röle çıkışı | Çıkış tipi ve fonksiyonları P4 ve PJ tarafından ayarlanır, güç kaynağı olmadan NO kontağıdır, kapasite: AC250V/5A | ||||||||
| 4 | ||||||||||
| 5 | Arıza rölesi çıkışı | Yumuşak başlatıcı arızalandığında, bu röle kapanır, güç kaynağı olmadan NO kontağıdır, kapasite: AC250V/5A | ||||||||
| 6 | ||||||||||
| Giriş | 7 | Geçici durdurma | Yumuşak yol vericinin normal şekilde çalışması için bu terminalin terminal10 ile kısaltılması gerekir. | |||||||
| 8 | Durdur/sıfırla | 2 hatlı, 3 hatlı terminalleri kontrol etmek için 10 numaralı terminale bağlanır, Bağlantı yöntemine göre. | ||||||||
| 9 | Başlangıç | |||||||||
| 10 | Ortak terminal | |||||||||
| Analog çıkış | 11 | simülasyon ortak noktası (-) | Çıkış akımı nominal akımın 4 katı 20mA'dir, ayrıca harici DC metre ile tespit edilebilir, çıkış yük direnci Maksimum 300'dür. | |||||||
| 12 | simülasyon akım çıkışı (+) | |||||||||
Ekran paneli
| Gösterge | Talimat | ||||||||
| HAZIR | Güç açık ve hazır durumdayken, bu gösterge yanar | ||||||||
| GEÇMEK | baypas çalışırken bu gösterge yanar | ||||||||
| HATA | arıza meydana geldiğinde bu gösterge yanar | ||||||||
| A | ayar verileri geçerli değerdir, bu gösterge yanıyor | ||||||||
| % | ayar verileri güncel yüzdedir, bu gösterge açıktır | ||||||||
| s | ayar verileri zaman, bu gösterge ışıktır | ||||||||
durum göstergesi talimatı
Düğme talimat talimatı
RDJR6 serisi yumuşak marş motorunun 5 çeşit çalışma durumu vardır: hazır, çalışıyor, arıza, başlat ve durdur, hazır, çalışıyor, arıza
bağıl gösterge sinyali vardır. Talimatlar için yukarıdaki Tabloya bakınız.
Yumuşak başlatma ve yumuşak durdurma işlemlerinde, yalnızca başka bir durumdaysa veri ayarlanamaz.
Ayar durumunda, ayar durumu 2 dakika sonra herhangi bir işlem yapmadan ayar durumundan çıkacaktır.
Önce "enter" tuşuna basın, ardından marş motoru şarj olur ve çalışmaya başlar. Uyarı sesini duyduktan sonra, marş motoru sıfırlanabilir.
veri fabrika değerine geri döndü.
Görünüm ve montaj boyutu
Uygulama diyagramı
Normal kontrol diyagramı
Talimat:
1.Harici terminal iki hatlı tkontrol tipini benimser. KA1 başlatma için kapatıldığında, durdurma için açılır.
2. 75 kW'ın üzerindeki yumuşak yol vericilerde, yumuşak yol vericinin iç röle kontağının sınırlı tahrik kapasitesi nedeniyle, orta röle tarafından bypass kontaktör bobininin kontrol edilmesi gerekir.
12.2 Bir ortak ve bir yedek kontrol diyagramı
12.3 Bir ortak ve bir yedek kontrol diyagramı
Talimat:
1. Diyagramda, harici terminal iki hatlı tiptedir
(1KA1 veya 2KA1 kapandığında çalışır, kırıldığında durur.)
2. 75 kW'ın üzerindeki yumuşak yol vericilerde, yumuşak yol vericinin iç orta röle kontağının sınırlı tahrik kapasitesi nedeniyle bypass kontaktör bobininin orta röle ile kontrol edilmesi gerekir.